
通过imu获得的姿态数据,采用闭环控制的方式,无论平面如何晃动,机器人都保持姿态稳定。
通过imu获得的姿态数据,闭环控制实现机器人可以实时适应外力,调整到手掰动的目标姿势,类似试教功能。
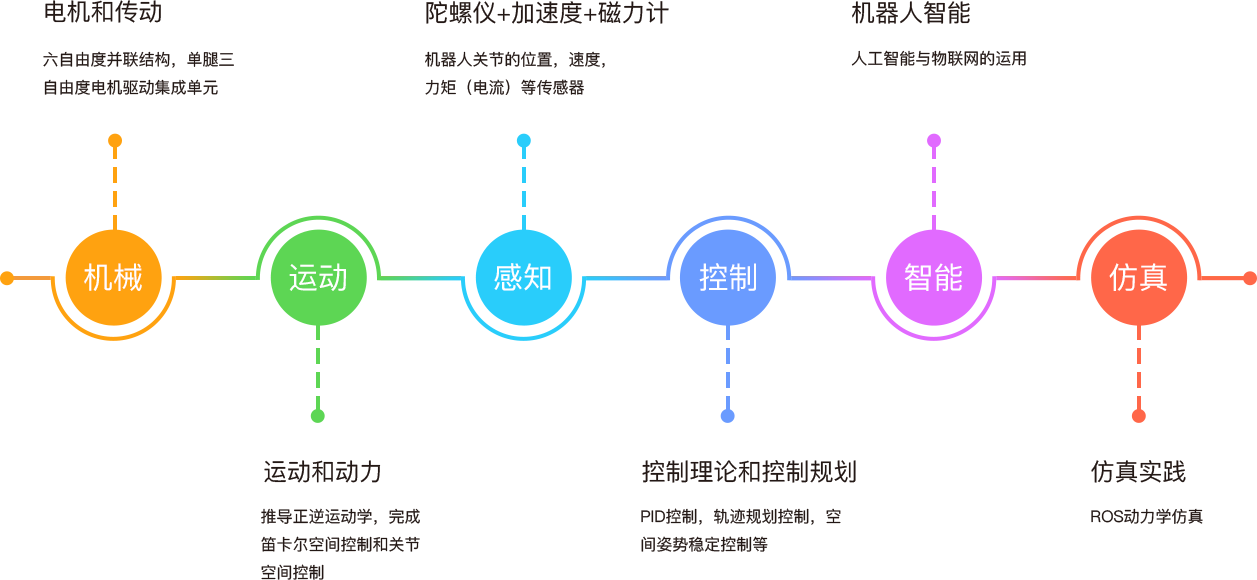
对机器人不同身高进行低中高速运动采用不同的步态策略,进行步态规划。
由于具有12个主动关节,通过运动学解耦实现机器人前进平移转动全向运动,并支持多个方向的运动叠加。
足尖不动的情况下,实现身体六个自由度(3个平移,3个转动)的运动控制。
提供蓝牙或者usb串口的用户控制接口,支持图形化二次编程接口。
在ros环境下,在rviz和gazebo平台上进行运动学与动力学仿真。
眼睛和耳朵,实现AI功能。


AI-DOG编程APP软件是由AI-DOG团队开发维护,平台围绕图形化编程,具有易操作,低龄化等特点。软件和Find-Go硬件通过蓝牙连接,分为遥控模式、示教模式和编程模式,可以在不同环境下对Find-Go硬件进行操控,提高对Find-Go操控的便利性。








